AN131 -如何设置传感器位置偏角

介绍
的MP6570是一个FOC控制器集成,高精度的角度传感器。为了检测转子位置,应在电机轴上安装磁铁(见图1)MP6570检测平面内磁场分量,获得转子位置。磁角传感器嵌入MP6570作为绝对转子位置传感器。在FOC算法中,电角必须用于Park变换和逆Park变换。因此,必须先设置转子与A相对准时的传感器位置偏置角。
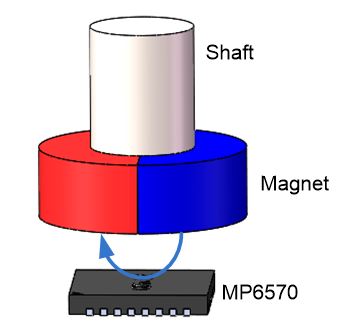
图1:MP6570如何感知转子位置
从传感器角度获取电角度
三相永磁同步电机/无刷直流电机由定子和转子两部分组成。
定子由三个线圈盘绕在定子铁心上组成。三相绕组按120°规律分别放置。当有交流电流通过三相绕组时,在空间中产生一个圆形旋转磁场(Fs),其旋转频率与交流电流频率相同。
转子由一对或多对永久磁极组成,提供恒定的转子磁场(Fr)。
稳态运行时,Fr跟随定子磁Fs,转速相同。如果站在转子磁场Fr轴上看定子磁Fs,定子磁Fs就变成了直流分量。这意味着我们可以找到一个合适的坐标变换,将三相交流元件切换为两相直流元件,以便于控制。两相直流分量,称为d轴(转子磁链轴)分量和q轴(先导d轴90°)分量,可以分别解耦和控制。这被称为面向场控制(FOC)。正常情况下,d轴电流ID为零,使定子磁链与转子磁链垂直,以获得更好的效率和更大的转矩。
如果已知转子磁链d轴与相A轴之间的夹角,可以很容易地进行3- 2转换(见图2)。转子磁链与定子相向量A之间的夹角定义为电角。
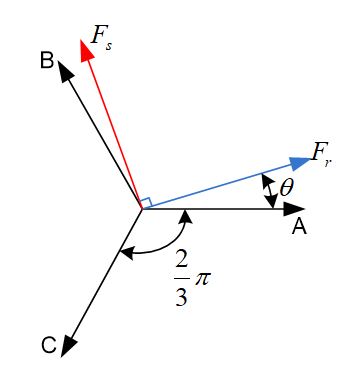
图2:电角度
在制造过程中,磁体可能任意安装在电机轴上,转子极与磁极对齐之间没有固定关系。对于不同的电机组,得到的角度MP6570角度传感器与转子电角度有一定的偏差(见图3)。
求偏置MP6570
当电机绕组a有正电流时,矢量表示为a +。当电流为负时,矢量表示为A-。图4显示了包含六个基本向量的空间矢量图。
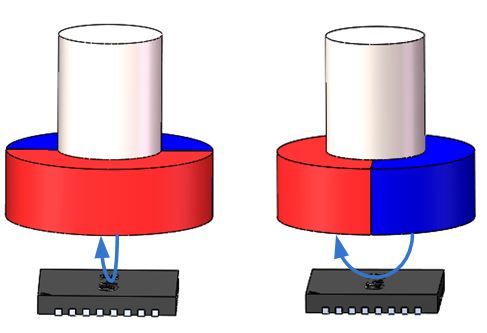
图3:磁铁安装在不同的电机上
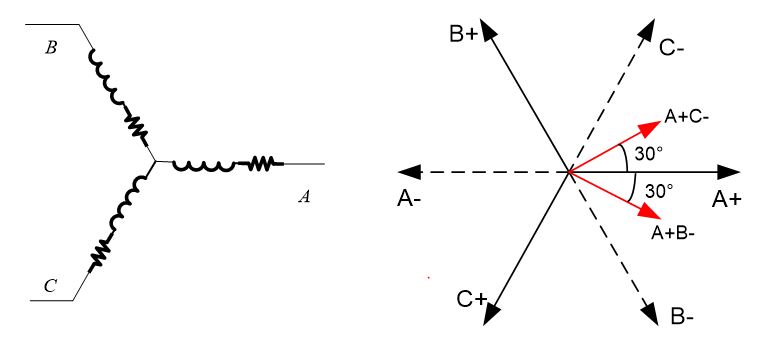
图4:发现星形电机的θ偏置
要得到电角为零时的位置,需要在电机a绕组上加电流,但在实际电机中,没有办法只给a相绕组加电流。电流必须流过相位绕组B或C。A+B-和A+C-的矢量和也与矢量A对齐MP6570.
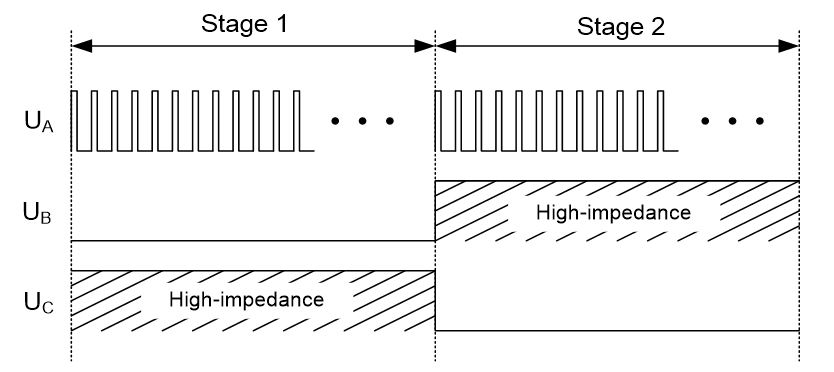
图5:Auto-Theta Bias期间的切换逻辑
在阶段1中,A相处于开关状态,B相低侧开关打开,C相处于高阻抗状态。转子对准A+B-矢量位置。在阶段2中,A相处于开关状态,B相处于高阻抗状态,C相低侧开关处于打开状态。转子对准A+C-矢量位置。通过设置不同的A相占空比和时间间隔,可以控制对准转子的转矩电流,以匹配所用电机的特性。这个操作可以通过将值域和时间间隔设置到相应的寄存器来自动完成。这可以通过遵循本指南或使用eMotion Virtual Bench (MPS开发的GUI软件)轻松完成。
星型和德尔塔连接电机
三相无刷直流/永磁同步电动机定子绕组由三个线圈组成。有两种常见的电气绕组结构:星型和三角形。星型配置将所有绕组连接到一个中心点,并将电源应用到每个绕组的剩余端(见图6a)。的delta configuration connects three windings to each other in a triangular circuit and power is applied at each of the connections (see Figure 6).
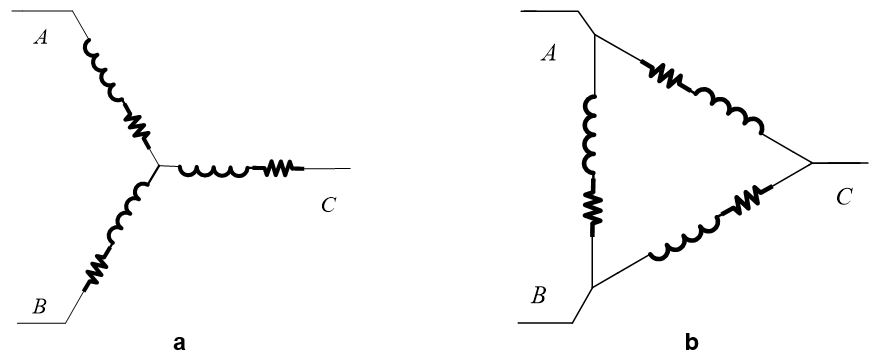
图6:星形和三角形连接电路
的MP6570可用于星形和三角连接电机使用相同的对齐方法,以找到θ偏差。
设计总结
当转子对准相A时,传感器角度,称为θ偏置,应首先找到操作FOC控制。这可以通过遵循本指南或使用eMotion虚拟工作台轻松完成。
的MP6570可用于三角连接电机。没有必要改变theta偏差。
_______________________
你觉得这个有趣吗?获得有价值的资源直接到您的收件箱-发送每月一次!
技术论坛
 4小时前的最新活动
4小时前的最新活动
 6个评论
4周前的最新活动
2的评论
一个月前的最新活动
1评论
6个评论
4周前的最新活动
2的评论
一个月前的最新活动
1评论
登录您的帐户
创建新帐户