使用外部旋钮巴克监管改善瞬态性能综合补偿网络

介绍
高功率密度要求,董事会层面的空间限制在现代应用程序,如照明、ADAS, USB -呼吁更高的集成在巴克监管者。188比分直播吧有一种趋势在芯片集成mosfet和补偿网络。这种集成的补偿网络的无源元件可以节省成本,空间,和设计迭代。然而,它也限制了进一步优化能力更好的瞬态响应的控制回路。本文将讨论如何使用外部旋钮,进一步优化内部补偿巴克监管机构的瞬态性能。
概述的峰值电流模式(PCM)控制在巴克监管者
的主要优势之一峰值电流模式控制电压(PCM)模式(VM)控制是PCM控制减免VM控制的复共轭极点为两个单杆,简化补偿网络设计。图1显示了一个典型的PCM控制buck监管机构示意图及其波德图。
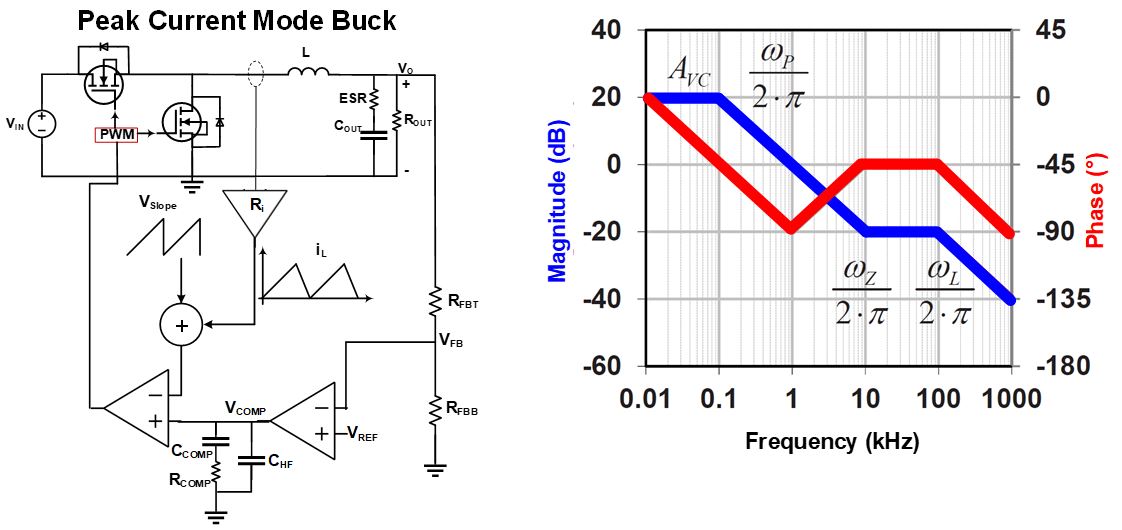
图1:PCM巴克调节器原理和波德图
两个功率级波兰人,(ωP和ωl)图1可以计算出方程(1)和方程(2),分别为:
$ $ \ omega_ P{} \大约\压裂{1}{C_{出}\空间x \空间R_{出来}}$ $ $ $ \ omega_L = {K_m \空间x \空间R_i \ / L} $ $在R我可以用方程(3)计算:
$ $ R_i = \空间x \空间R{年代}$ $和K米与方程(4)可以计算出当D = 0.5 (D代表工作周期):
$ $ K_m \大约{V_ {} \ / V_{坡}}$ $一个零(ωZ)的功率级波德图可以估计方程(5):
$ $ \ omega_Z = {1 \ / C_{出}\空间x \ ESR} $ $评估内部补偿网络
在巴克内部II型补偿网络监管机构包括一个零/极对(见图2)。
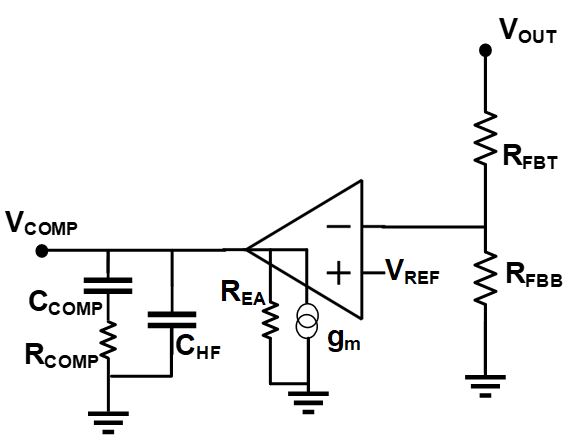
图2:II型补偿网络和零/杆的位置
II型补偿网络的零频率和极点频率可以计算方程(6)和方程(7),分别为:
$ $ \ omega_ {COMP} z1 = {1 \ / R_ {COMP} \空间x \空间C_ {COMP}} $ $ $ $ \ omega_ {COMP} p1 = {1 \ / R_ {COMP} \空间x \空间C_{高频}}$ $适当的带宽(BW)之间的权衡和阶段保证金(PM)在PCM巴克监管者,BW通常是设定在10%的开关频率(f西南),计算方程(8):
$ $ BW = 0.1 \空间x \ f {SW} $ $空间达到最大可用点,补偿网络零(COMP-Z1)必须放置BW的10%和20%之间,所以它可以提供最大的阶段在BW频率提高。这种关系可以用方程(9)表明:
$ $ 0.1 \空间x \空间BW f {COMP-Z1} $ $ <补偿网络极(COMP-P1)提供噪声衰减在更高的频率。在实践中,假设计算方程(10)可以作为一个好的经验法则COMP-P1频率:
$ $ f f {SW} / {COMP-P1} = 2 $ $COMP-Z1和COMP-P1无论是切换频率的结果之间的关系电脑及相关知识和C高频与方程(11)计算:
$ $ C_{高频}< 4 \ % \空间x \空间C_ {COMP} $ $额外的旋钮来进一步优化内部补偿网络
有两种有效的方法来进一步优化的瞬态性能巴克监管机构的内部补偿网络。一个是添加一个电阻串联反馈(神奇动物)销。FB系列电阻变化的BW转移曲线上下,大小没有显著影响相位曲线。高电阻电阻对应BW较低。建议将0Ω电阻串联的FB销在最初的设计中,如果需要可以改变。
下一个组件,它可以有效地用于增加点,是前馈电容(CFF)。这与R并联电容器被添加炉膛温度在反馈分频器,使第二个零补偿网络,使其类型III(见图3)。
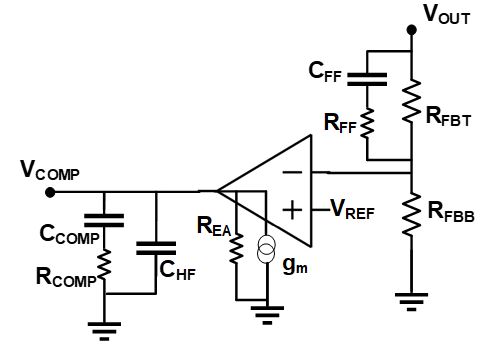
图3:III型补偿网络示意图和零/杆的位置
零的频率由CFF可以用公式(12)计算:
$ $ \ omega_ {COMP} z2 \大约{1 \ / R_ {FBT} \空间x \空间C_ {FF}} $ $把RFF与C系列FF增加了一个额外的极点补偿网络。这杆可用于提供额外的衰减频率更高。这杆可以计算的频率方程(13):
$ $ \ omega_ {COMP} p2 \大约{1 \ / R_ {FF} \空间x \空间C_ {FF}} $ $在PCM系统的方法来优化补偿网络监管机构
基于点上面所讨论的,这是一个系统化的方法来评估和优化内部补偿网络:
- 设置监管机构目标BW 0.1 x f西南。
- 计算内部COMP-Z1频率方程(6),并确保它符合设定的目标方程(14): $ $ 0.1 \空间x \空间BW f {COMP-Z1} < < 0.2 \空间x \空间BW $ $
- 确保满足方程(15)设定的要求: $ $ C_{高频}< 4 \ % \空间x \空间C_ {COMP} $ $
- 最初的波德图运行一次舞台设计完成。确保:
- BW接近目标(0.1 x f西南)。
- 在目标BW阶段开始下降,而不是之前。
- 如果步骤4的BW测量没有接近目标BW第1步中指定,调整FB系列电阻器BW与目标。
- 下午重新运行波德图并检查,以确保它超过60°的FB系列电阻器。如果是这样,忽略下面的步骤。如果没有,继续步骤7到10。
- C组FF这样COMP-Z2频率附近的价值计算方程(16): $ $ 0.2 \空间x \空间(目标\空间BW) f {COMP-Z2} < < 0.4 \空间x \空间(目标\空间BW) $ $
再次测量波德图,确认最大阶段提高相图与目标BW频率。
- 调整/增加FB系列电阻器将BW回到原来的目标价值,因为CFF在上一步中改变了大小曲线。
- 目标BW (0.1 x f西南)和目标点(> 60°)应该被实现。
- 可选:高衰减在更高频率(高频),添加一个电阻(RFF)与C系列FF(见图3)。这将创建一个第二杆(COMP-P2)。正确设置COMP-P2频率(fCOMP-P2),估计最低ESR零频率方程(5)和f西南/ 2,然后设置较低的两个COMP-P2频率作为目标。从一个R开始FF价值带来COMP-P2目标值。注意,负相由于这杆将在0.1 x f生效COMP-P2,可能稍微降低点。
上面的程序也适用于部分与外部补偿网络。在这种情况下,R电脑及相关知识C电脑及相关知识C高频应该选择这样的需求方程(14)和方程(15)。
案例研究——MPQ4420
让我们看一个实际例子来说明这一原则。议员的MPQ4420 36 v, 2,同步降压转换器集成场效应管和集成的补偿网络,它有一个默认的400 khz固定开关频率。图4显示了典型的应用原理和内部误差放大器MPQ4420。
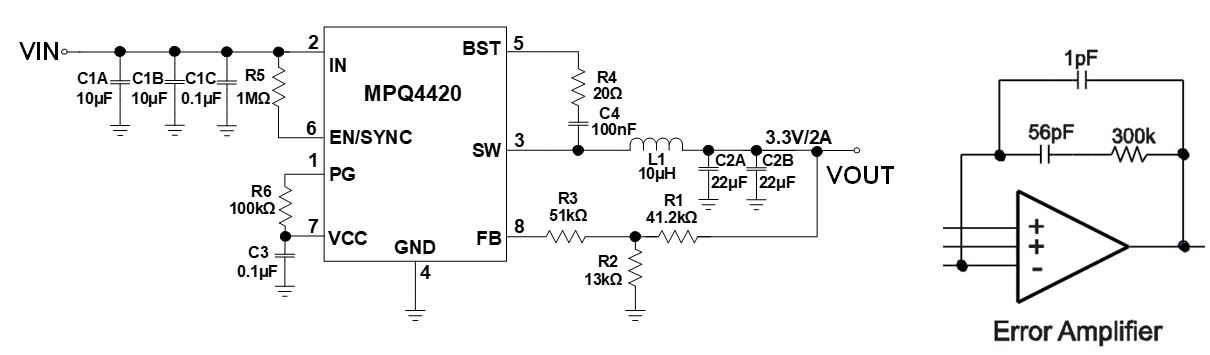
图4:MPQ4420示意图和内部补偿网络体系结构
让我们运用循序渐进的方法。请参考表1和图5中,遵循以下步骤:
- 由于开关频率是400 khz,目标BW是设定在10%的价值,这是40 khz。
- 计算COMP-Z1频率方程(6)。这个结果是COMP-Z1约9.5 khz。这是接近目标COMP-Z,应该4 khz和8 khz之间基于方程(14)。
- 比较C高频C电脑及相关知识。基于图4C高频和C电脑及相关知识分别是1 pf 56 pf。因此,C高频大约2%的C电脑及相关知识。这满足方程(15)设定的要求。
- 模拟整个的波德图示意图(包括功率级组件)。图5(一个)和表1显示了预示测量结果。BW是72千赫,这超过了40 khz的目标。另一方面,在大约40 khz阶段开始下行,这符合预期目标。
- 增加了FB系列电阻器。R3在图4中显示了FB系列电阻器。典型值是10 kΩ100 kΩ之间。增加了FB系列电阻器值在步骤5中kΩ直到目标BW。在这个例子中,目标实现BW 15 kΩFB系列电阻器。
- 比较点通过第5步到目标点,这应该超过60°。如表1所示,点只有34°。因此,需要额外的阶段提高达到目标点。
- 添加第二个补偿器(COMP-Z2)提供额外的阶段在BW频率提高。CFF值计算方程(12)是220 pf。图5 (b)显示额外的阶段提高后的波德测量结果添加到系统中。最大的阶段目标BW增加发生在40 khz。
- 更改/增加FB系列电阻器返回BW以来的目标价值(40 khz)添加CFF/ COMP-Z2增加了BW 104千赫。图5 (c)显示了波德测量结果。
- 确保系统优化的BW 40千赫(0.1 x f西南)和一个点超过60°。这两个目标应该是实现。
- 提供更高的衰减高于开关频率,增加RFF与C系列FF第二杆(COMP-P2)。由于开关频率是400千赫< 1 mhz, f西南/ 2是设置为目标定位COMP-P2频率。知道目标fCOMP-P2和CFF的初始值RFF应该是3.6 kΩ。
图5 (d)显示第十步之后预示测量结果。观察到这里,大小曲线和相位曲线的斜率都略高于BW增加,这意味着更高的噪声衰减高于BW频率。
第10步结果的总结(见表1)表明,BW上方的高衰减频率为代价实现减少点6°,即使点仍然超过60°,这是最初的目标。如果6°点不可取,减少使用一个较小的RFF价值恢复失去的一些点。

步骤5)第四步

步骤7 b)第5步

步骤8 c)步骤7

步骤10 d)步骤8
图5:预示测量MPQ4420补偿网络的设计
| 步骤4 | 步骤5 | 步骤7 | 步骤8 | 第十步 | |
| FB系列电阻器 | 0Ω | 15 kΩ | 15 kΩ | 51 kΩ | 51 kΩ |
| CFF | NP | NP | 220 pf | 220 pf | 220 pf |
| RFF | NP | NP | NP | NP | NP |
| BW | 72千赫 | 41千赫 | 104千赫 | 40千赫 | 38 khz |
| 点 | 12º | 34º | 44º | 78º | 72º |
表1:总结MPQ4420补偿网络的优化
MPQ4420瞬态性能验证
图6显示了如何验证MPQ4420的补偿网络参数进行了优化。名义上的输出电压3.3 v。当负载发生转变时,输出电压(V出)有一个过度/脱靶的不到2%,然后返回其标称值。在V没有响出负载过渡期间确认适当的点的系统是稳定的。
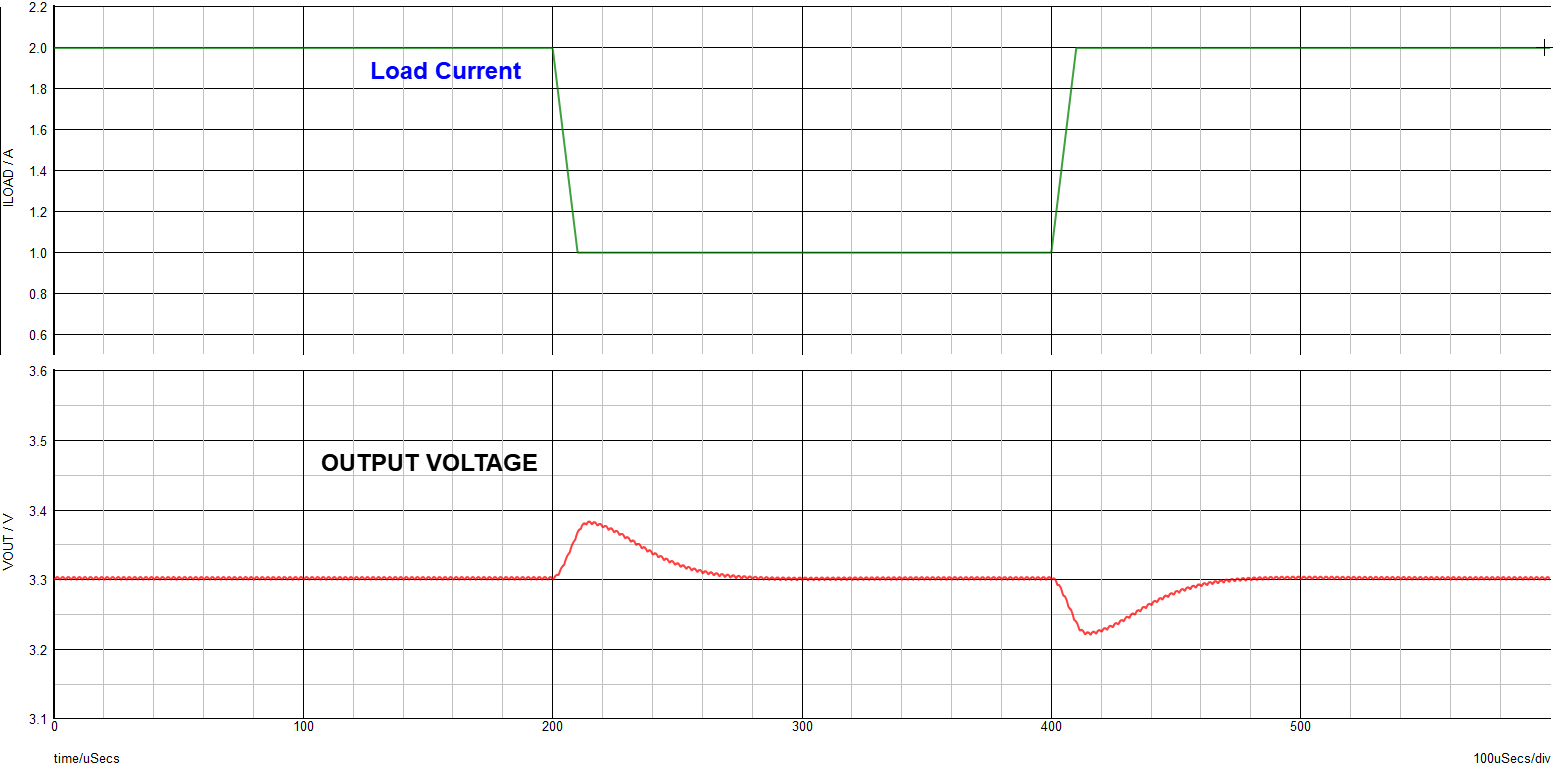
图6:瞬态响应的MPQ4420补偿网络进行了优化
结论
在这篇文章中,已经提供了一个系统化的方法来进一步优化内部补偿巴克监管机构的瞬态性能,证明MPQ4420。有三个主要优势与该方法有关。首先,这种循序渐进的方法所需的迭代的数量的限制。其次,在每一步所提出的技术,只改变一个参数简化优化。第三,这种方法有最小的不依赖于功率级组件,特别是在开关频率低于1 mhz。
_______________________
你觉得这有意思吗?获得有价值的资源直接进入你的收件箱——每月发送一次!
技术论坛
 最新活动3年前
最新活动3年前
 4评论
最新活动3小时前
1评论
最新活动3小时前
5个评论
4评论
最新活动3小时前
1评论
最新活动3小时前
5个评论
登录到您的帐户
创建新帐户